

EtherCAT (اترکت) یک پروتکل مبتنی بر اترنت و بسیار انعطافپذیر است که با سرعت زیادی در حال توسعه میباشد.
از آنجا که پیامهای EtherCAT قبل از انتقال در هر گره پردازش میشوند، باعث ایجاد سرعت و کارایی بالا نیز میشود. این فرآیند همچنین انعطافپذیری در توپولوژی و همگامسازی باورنکردنی را پدید میآورد.
به جز مزایای حاصل از «پردازش سریع»، EtherCAT از زیرساخت فوق العادهای بهره میبرد. این پروتکل همچنین از داشتن گروه کاربران قوی نفع میبرد. ترکیب این مزایا بدین معنی است که EtherCAT آماده ادامه رشد است.
اترکت (EtherCAT) چیست؟
فناوری EtherCAT، در اصل اترنتی است که برای تکنولوژی اتوماسیون کنترلی و صنعتی طراحی و پیادهسازی شده است. پس اترکت، یک فناوری مبتنی بر اترنت است که با در نظر گرفتن اتوماسیون صنعتی و الزامات آن توسعه داده شده است.
تاریخچه EtherCAT
Beckhoff، یک شرکت اتوماسیون آلمانی، سیستمی مبتنی بر fieldbus به نام Fast Lightbus ایجاد کرد تا مشکل استفاده از پهنای باند کم موجود در سایر پروتکلهای اترنت را برطرف کند. این پروتکل منجر به ساخت EtherCAT شد که Beckhoff در سال 2003 آن را منتشر کرد. برای اطلاعات بیشتر اینجا را کلیک کنید.

گروه تکنولوژی EtherCAT
در سال 2004، Beckhoff به ایجاد یک گروه جدید برای پیشبرد پروتکل EtherCAT کمک کرد. تلاش آنها منجر به تشکیل گروه تکنولوژی EtherCAT شد.
استانداردهای بینالمللی
در سال 2005، EtherCAT به صورت IEC/PAS 62407 استاندارد سازی شد. این استاندارد اکنون منسوخ شده است، اگرچه این موضوع به دلیل نقص در EtherCAT نیست.
در عوض، EtherCAT با تعدادی از استانداردهای دیگر ادغام شده، که نشانهای از تنوعپذیری آن است. استانداردهای فیلدباس IEC 61158 و IEC 61784-2 IEC 61158I که هر دو، از سال 2007 EtherCAT را شامل میشوند. EtherCAT همچنین در استاندارد منتشر شده ISO 15745-4 نیز گنجانده شده است.
اترکت EtherCAT از فریمهای استاندارد و همچنین لایه فیزیکی مشخص شده در استاندارد اترنت IEEE 802.3 استفاده میکند. با این حال این پروتکل نگرانیهای خاصی در اتوماسیون صنعتی را نیز برطرف میکند. برای مثال میتوان به موارد زیر اشاره کرد:
- زمان پاسخ سریع
- حداقل داده مورد نیاز هر دستگاه
- هزینه کم پیادهسازی
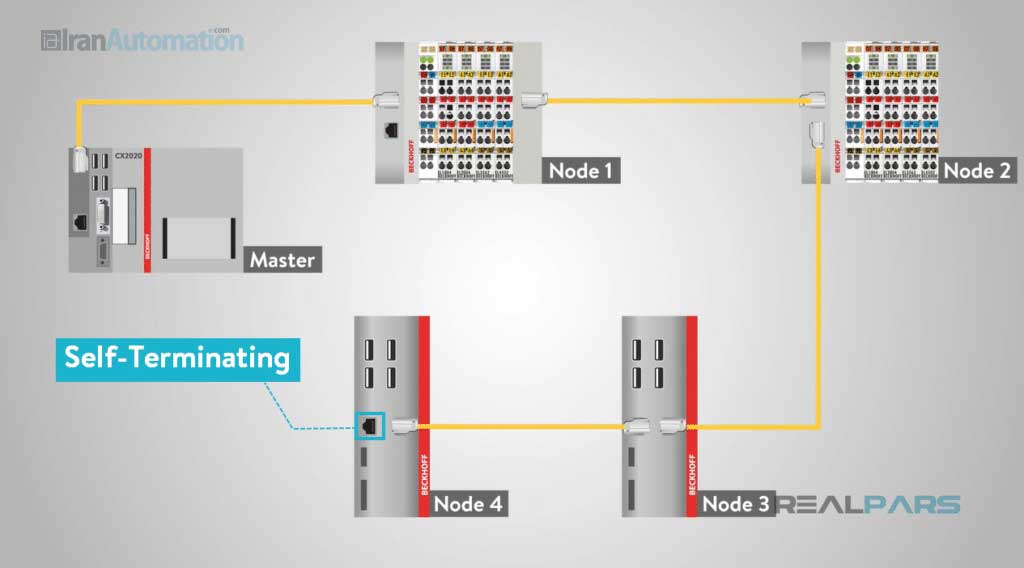
برای پیادهسازی شبکه EtherCAT به سختافزار خاصی نیاز نیست. همچنین هیچ سوئیچ خارجی در شبکه EtherCAT استفاده نمیشوند. در عوض، هر دستگاه، یک سوئیچ را در خود تعبیه کرده است. هر گرهای که گره بعدی در رشته را تشخیص ندهد، شبکه را به طور خودکار در آن نقطه خاتمه میدهد.
اگر دستگاه Master دو پورت اترنت داشته باشد، شبکههای EtherCAT میتوانند به صورت حلقهای سیمکشی شوند. پارگی کابل در هر نقطه از حلقه، توسط پورتهای بالادست و پایین دست، بسته میشود.
تفاوت بین اترنت Ethernet و اترکت EtherCAT
اترنت یک راهحل عملی برای بسیاری از کاربردهای صنعتی نیست؛ همانطور که فریمهای داده را از تعداد زیادی آدرس جداگانه عبور میدهد، جایی که دادهها ممکن است چیزی به سادگی یک تک رجیستر، برای به دست آوردن داده آنالوگ Real-Time باشند.
این مسیریابی مبتنی بر گره، نیازمند پهنای باند عظیمی است، زیرا بستههای داده تنها زمانی حرکت میکنند که دستگاههای Master یا Client درخواست داده داشته باشند.
اما در سمت مقابل، EtherCAT از لایه فیزیکی و لایه پیوند داده مشابه اترنت استفاده میکند، اما پروتکلها از آنجا تغییر مسیر میدهند.
همانطور که قبلا گفتیم اترنت میتواند دادهها را از میان گرههای مختلف، در یک پیکربندی Master/Slave عبور دهد، و دادههای درخواست شده را ارسال نموده و دریافت نماید.
هنگام استفاده از پروتکل EtherCAT، دستگاه Master یک داده شامل احتمالا تنها یک فریم برای کل شبکه گرهها را ارسال میکند که از هر گره عبور خواهد کرد.
دستگاه master در این ساختار حکم رئیس را دارد و تنها گرهای است که اجازه ارسال فریم دارد. سپس فریم، ارسال شده و توسط هر گره در شبکه به گره پایینتر فرستاده میشود. این روش کمک میکند تا عملیات به صورت Real-Time و بدون تاخیر انجام شوند.
پردازش داده دستگاههای EtherCat
هر دستگاه EtherCAT فریم داده را پردازش میکند، که به سخت افزار یا نرمافزار آن دستگاه مرتبط است، و در زمان اجرا داده خود را هنگام عبور از شبکه به فریم داده اضافه میکند.
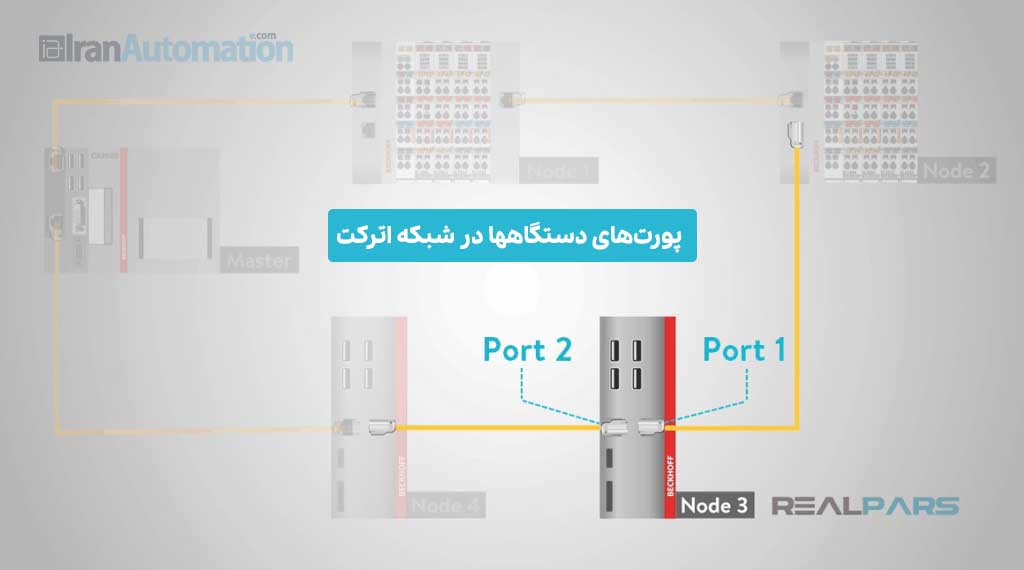
شبکههای EtherCAT به سوئیچهای خارجی در شبکه نیاز ندارند.
هر دستگاه EtherCAT، معمولا دارای دو پورت اترنت است؛ پورت اول، پورت دریافت یا همان کابل متصل شده به گره قبلی است و پورت دوم به گره بعدی در شبکه متصل است.
پردازش داده در هنگام اجرا در سختافزار دستگاه، بزرگترین مزیت EtherCAT است.
سرعت مورد نیاز برای سازگاری با EtherCAT
اگرچه هنوز کمی تاخیر در فریم داده و در هنگام افزودن داده توسط دستگاه به فریم داده وجود دارد، اما این تاخیر توسط جریان داده تکی EtherCAT، در مقابل چندین فریم داده مورد استفاده در یک شبکه اترنت به شدت کاهش یافته است. این مزیت میتواند یک عیب هم به حساب آید!
بسیاری از دستگاهها ممکن است نتوانند این کاهش شدید زمان چرخه را مدیریت کنند، و ممکن است نیاز باشد شبکه EtherCAT کمی کندتر شود تا با این دستگاهها سازگار گردد.
از آنجایی که شبکه EtherCAT میتواند کند شود، بار دیگر این نقص را میتوان به عنوان یک مزیت در نظر گرفت.
سیستم کلاک توزیع شده EtherCAT
اترکت از یک سیستم کلاک توزیع شده نیز استفاده میکند. این روش امکان جیتر کم بدون سختافزار اضافی را فراهم میآورد، و با اهمیت همزمانسازی مورد نظر در اتوماسیون صنعتی مطابقت دارد.
زمانی که فریم EtherCAT از هر گره عبور میکند، آن گره، یک برچسب زمانی «پیام دریافت شده» به داده خود اضافه میکند.
هر گره هنگام دریافت پیام، یک برچسب زمانی را اضافه میکند؛ سپس هر گره دوباره، یک برچسب زمانی را هنگام برگشت فریم از گرهها، از طریق مسیر master اضافه میکند.
دستگاه master یک تاخیر مشخصی برای هر گره دارد، زیرا داده برچسب زمان با هر انتقال فریم داده محاسبه میشود.
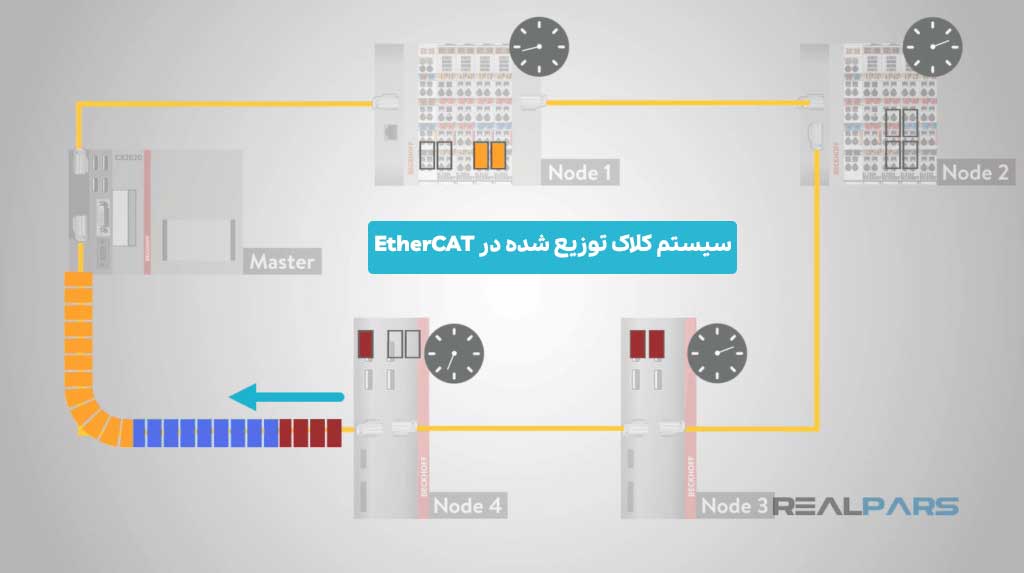
با به کارگیری توپولوژی حلقه در EtherCAT همانطور که قبلا صحبت شد، ایجاد دادههای دقیقتر با هر انتقال و به دلیل مکانیزم کلاک توزیع شده تضمین میشود. این یکی از مزیتهای EtherCAT است.
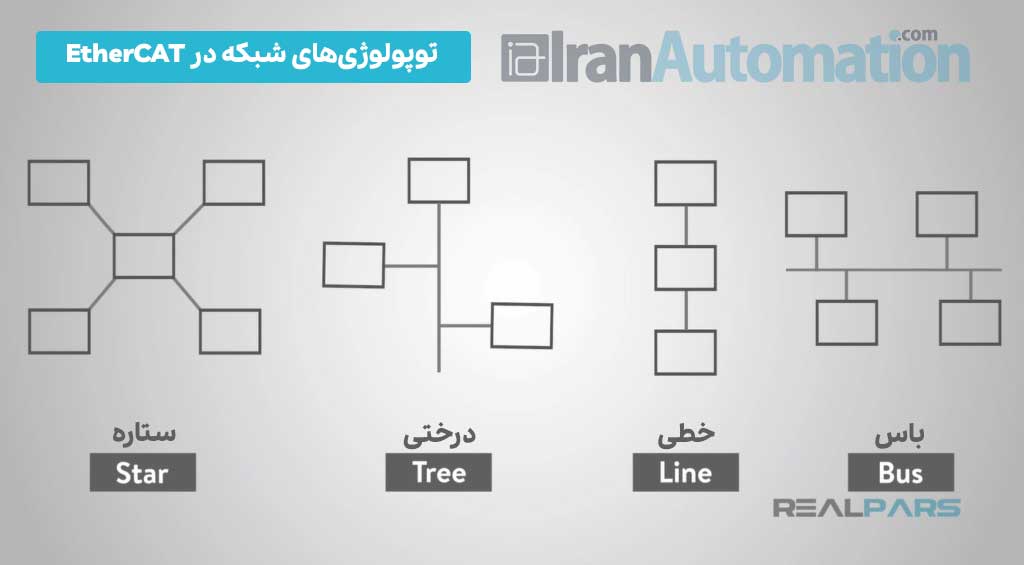
توپولوژی های شبکه در EtherCAT
مزیت دیگری نیز در قالب توپولوژی شبکه وجود دارد. بسیاری از توپولوژیهای شبکه متفاوت، ممکن است در یک شبکه EtherCAT مورد استفاده قرار گیرند. چون EtherCAT از لایههای دوطرفه کامل اترنت استفاده میکند، دستگاه Slave آن فریم را به طور خودکار به دستگاه master ارسال میکند که یک پورت باز در پایین دست شبکه نیز قرار دارد؛ و خود، به شکل یک پایانه است.
اصل «پردازش سریع» EtherCAT علاوه بر سرعت، مزیت دیگری نیز دارد. شبکههای EtherCAT را میتوان در انواع مختلف توپولوژی پیکربندی کرد. درست همانند اترنت، توپولوژی ستاره بسیار سادهتر از بقیه نیز میباشد. با این حال، EtherCAT میتواند بسیار فراتر از توپولوژی ستاره گسترش یابد.
EtherCAT امکان استفاده در سیستمهای fieldbus را با استفاده از سختافزار اترنت ایجاد میکند.
EtherCAT دارای افزونگی داخلی است که پارگیهای احتمالی در سیمکشی را جبران میکند. هنگامی که خط شکسته میشود، شبکه میتواند وقفه بوجود آمده را تشخیص دهد.
فریم EtherCAT میتواند تا انتهای شبکه حرکت کند و چون پیامها در مسیری معکوس به عقب برمیگردند، فریم برعکس شده و به Master باز میگردد. به این ترتیب، همه شبکههای EtherCAT میتوانند مانند توپولوژی حلقه بسته عمل کنند.
توپولوژی ستاره در اترنت ساده است و میتواند مورد استفاده قرار گیرد. اما شبکههای EtherCAT میتوانند به خوبی فراتر از آن با یک توپولوژی درختی، خطی و غیره نیز بسط پیدا کنند.
این روش میتواند در یک سیستم فیلدباس نیز مورد استفاده قرار گیرد؛ استفاده از سختافزار اترنت، انعطافپذیری فوقالعادهای به شبکه EtherCAT شما میدهد.
افزونگی در EtherCAT با استفاده از توپولوژی حلقه
با در نظر گرفتن توپولوژی حلقه اصلی EtherCAT، اتصال شبکه به یک توپولوژی حلقه، یک افزونگی دولایه به سیستم اضافه خواهد کرد، اگر بتوانید تصورش کنید. چون ذاتاً یک توپولوژی حلقه است، اتصال پورت دوم دستگاه Master، اگر در دسترس باشد باعث افزونگی در سمت دیگرِ محل شکست شبکه میشود.
هر توپولوژی باید برای شبکه شما بررسی شود تا بهترین راهحل برای کاربرد مورد نظر شما انتخاب شود.
فریم اترکت EtherCAT
برای اینکه فریم EtherCAT بدون توقف در هر گره به حرکت خود ادامه دهد، بستههای داده باید مانند واگنهای قطار، حاوی اجزای خاصی باشد. با نگاهی به فریم EtherCAT، قیاس آن با قطار کاملا آشکار به نظر میرسد.
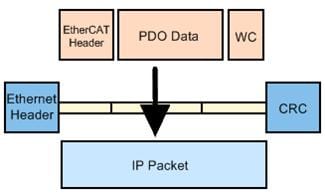
هدر EtherCAT
فریم EtherCAT با یک هدر استاندارد شروع میشود. اولین عدد صحیح، شناسه طول داده است. این بیت به گرهها اطلاع میدهد که طول قسمت فریم چقدر خواهد بود.
طول به ویژه در یک فریم مهم است؛ طول با تعداد بایتها و گرههای پیام متفاوت است، درست مانند تعداد بیشتری واگن قطار که قطار را طولانیتر میکنند. قسمت دوم هدر EtherCAT یک بیت رزرو شده است که پس از آن یک عدد صحیح قرار میگیرد. عدد صحیح نوع پیام را تعریف میکند.
داده PDO در فریم EtherCAT
پس از هدر، فریم EtherCAT شامل Objects Process Data یا PDOها میشود. PDOها با تعداد گرهها و پیامهای داخل قالب مطابقت دارند. هر PDO حاوی دادههای یک گره مانند محصول داخل واگن قطار است. PDOها نیز به صورت جداگانه مورد بررسی قرار میگیرند.
شمارنده کاری (WC) در فریم اترکت
قسمت نهایی یک فریم EtherCAT شمارنده کار است. شمارنده کار به محتوای قالب EtherCAT وابسته است. با اطمینان از صحت شمارنده کار، هر گره میتواند اطمینان حاصل کند که کل اطلاعات فریم را دریافت کرده است.
مزایای اترکت (EtherCAT) نسبت به اترنت
به عنوان نتیجهگیری باید بگوییم که EtherCAT، همان اترنت است؛ اما همراه با قابلیتهای بسیار بیشتری نسبت به اترنت…
EtherCAT که با در نظر گرفتن زمینه صنعتی طراحی شده است، نسبت به شبکه اترنت استاندارد، مزیتهای بسیار زیادی دارد که شامل موارد زیر است:
- افزایش سرعت بسیار زیاد
- کاهش ترافیک داده
- کاهش هزینه سختافزار برای پیادهسازی
- دادههای بسیار دقیقتر به دلیل وجود مکانیزم کلاک توزیع شده
قابلیت توسعه
دستگاههای EtherCAT Master را میتوان با استفاده از هر آدرس MAC استاندارد اترنت توسعه داد. سختافزار خاصی نیاز نیست. Beckoff یک دستگاه PC Master عرضه میکند که میتواند از کامپیوترهای مبتنی بر Windows به دستگاههای Slave EtherCAT دسترسی پیدا کند.
دستگاههای Salve EtherCAT برای دسترسی به شبکه EtherCAT باید از (EtherCAT ASICApplication) استفاده کنند. EtherCAT ASIC را Beckoff و سایر تامین کنندگان در دسترس قرار دادهاند.
هزینههای پیاده سازی پایینتر
هزینههای سختافزاری برای کنترلر یا دستگاه Master کم است چرا که سختافزار خاصی مورد نیاز نیست و هر کامپیوتر مجهز به اترنت میتواند به عنوان یک دستگاه Master استفاده شود.
دستگاههای Slave EtherCAT به سرمایهگذاری نسبتا زیادی در طراحی و توسعه نیاز دارند چرا که EtherCAT ASIC یک دستگاه فوتپرینت بزرگ است که گرانتر از ریزپردازندههای استاندارد Ethernet است.
در پیادهسازی سیستم، EtherCAT میتواند بسیار مقرون به صرفه باشد. برای تشکیل شبکه نیازی به سوئیچ، روتر یا هاب اضافی نیست و میتوان آن را در توپولوژی مناسب برای برنامههای کاربردی پیادهسازی کرد.
جمع بندی نهایی
EtherCAT عملکردی بسیار کارآمد دارد. پیادهسازی آن آسان است و پروتکل لایه باز کاربردی برای اترنت دارد. قابلیتهای همگامسازی و استفاده از پهنای باند کامل برای کاربردهای حرکتی که نیازمند همگامسازی تعداد زیادی درایو است، قضیه را بسیار جذاب میکند.
محبوبیت این شبکههای اترکت در بین مهندسان کنترل، که خواهان یک شبکه قوی و بلادرنگ با سرعت بالا و برای کنترلهای صنعتی هستند رو به افزایش است.








")


{kind=link}